Perception-Aware Planning
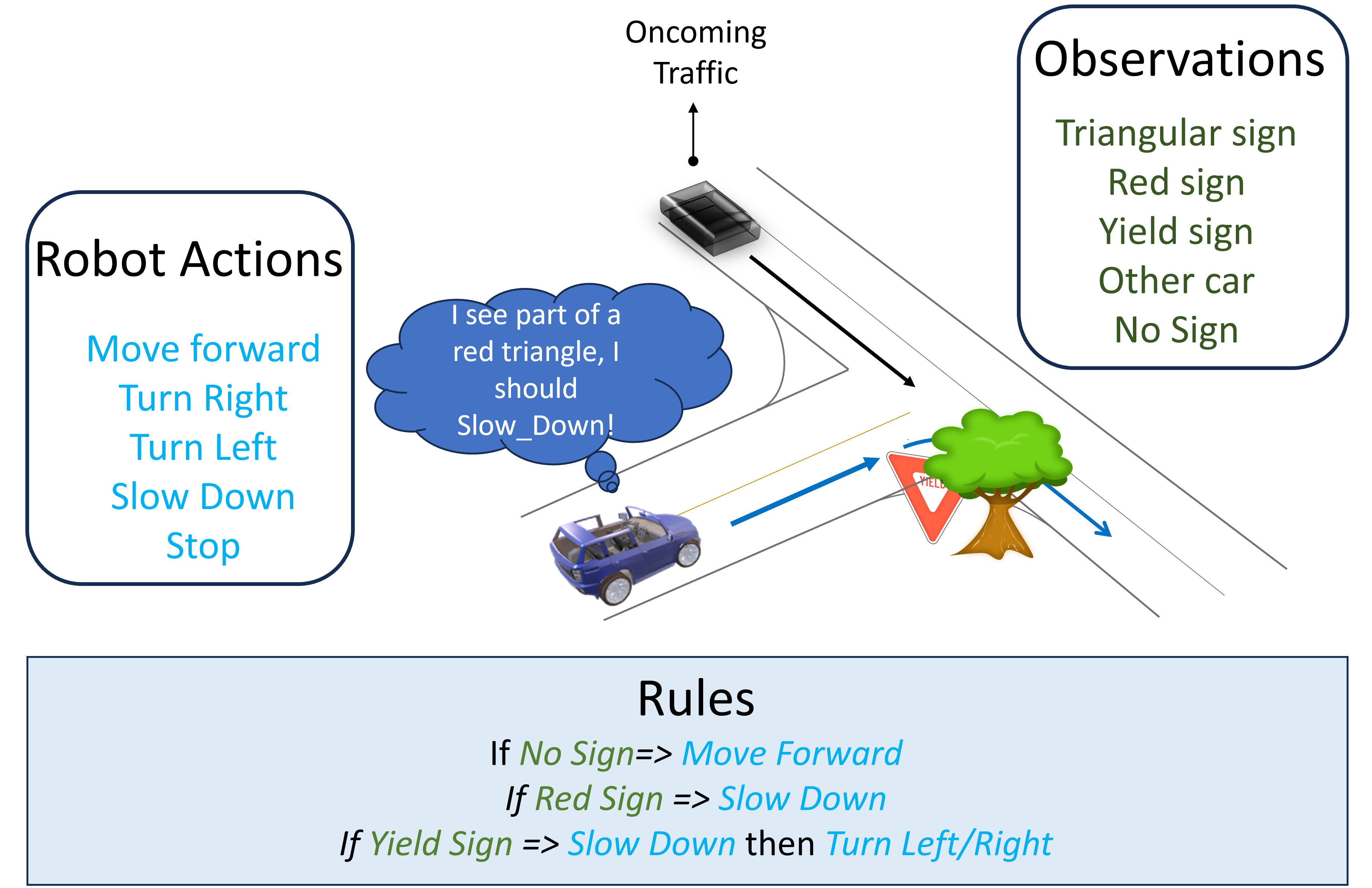
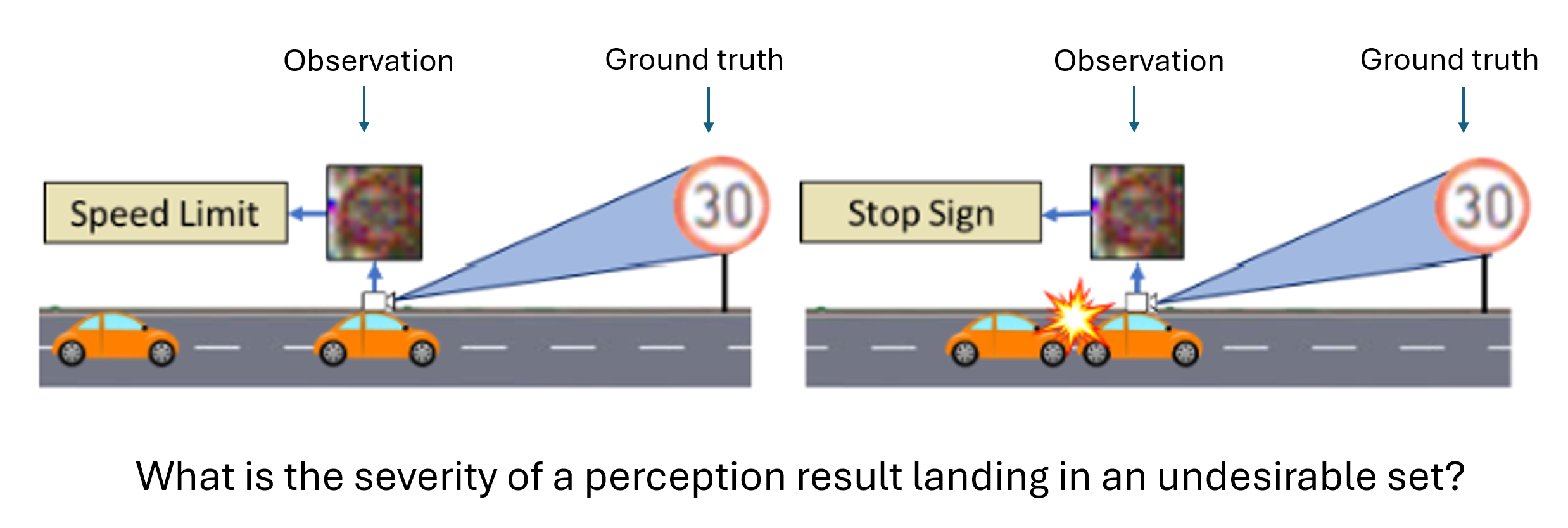
Traditionally, perception-aware planning is addressed in a sequential way. However, owing to real-world sensing limitations and to ensure timely decision-making, it is important to account for any relevant, potentially incomplete perception information at hand and instantiate planning. The decisions can be further refined as the robots gain more knowledge about the environment. To address this, my work considers evolution of semantic information and studies the interleaving between incrementally improving perception and the corresponding decisions to enable safer, timely decision-making.
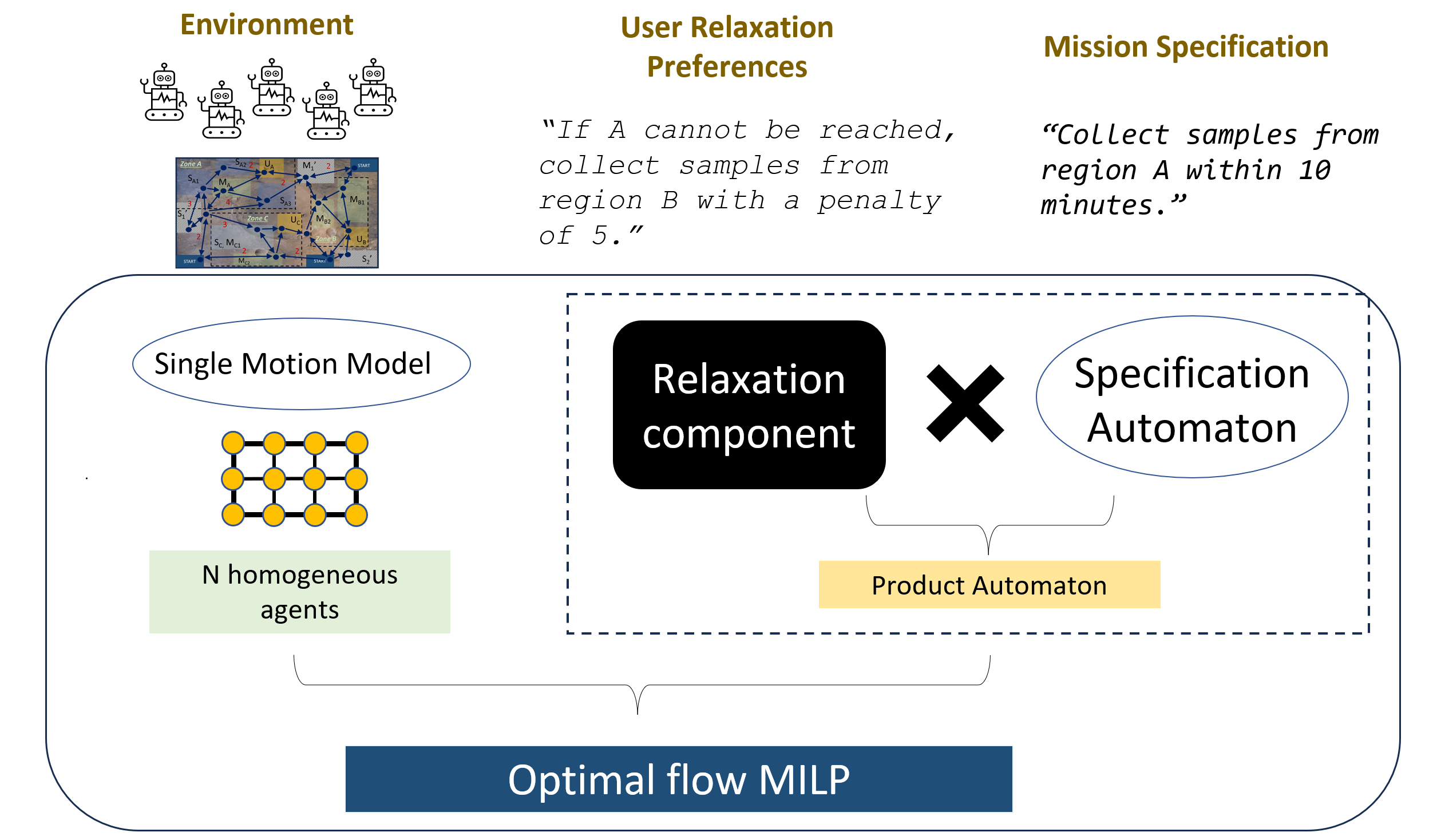
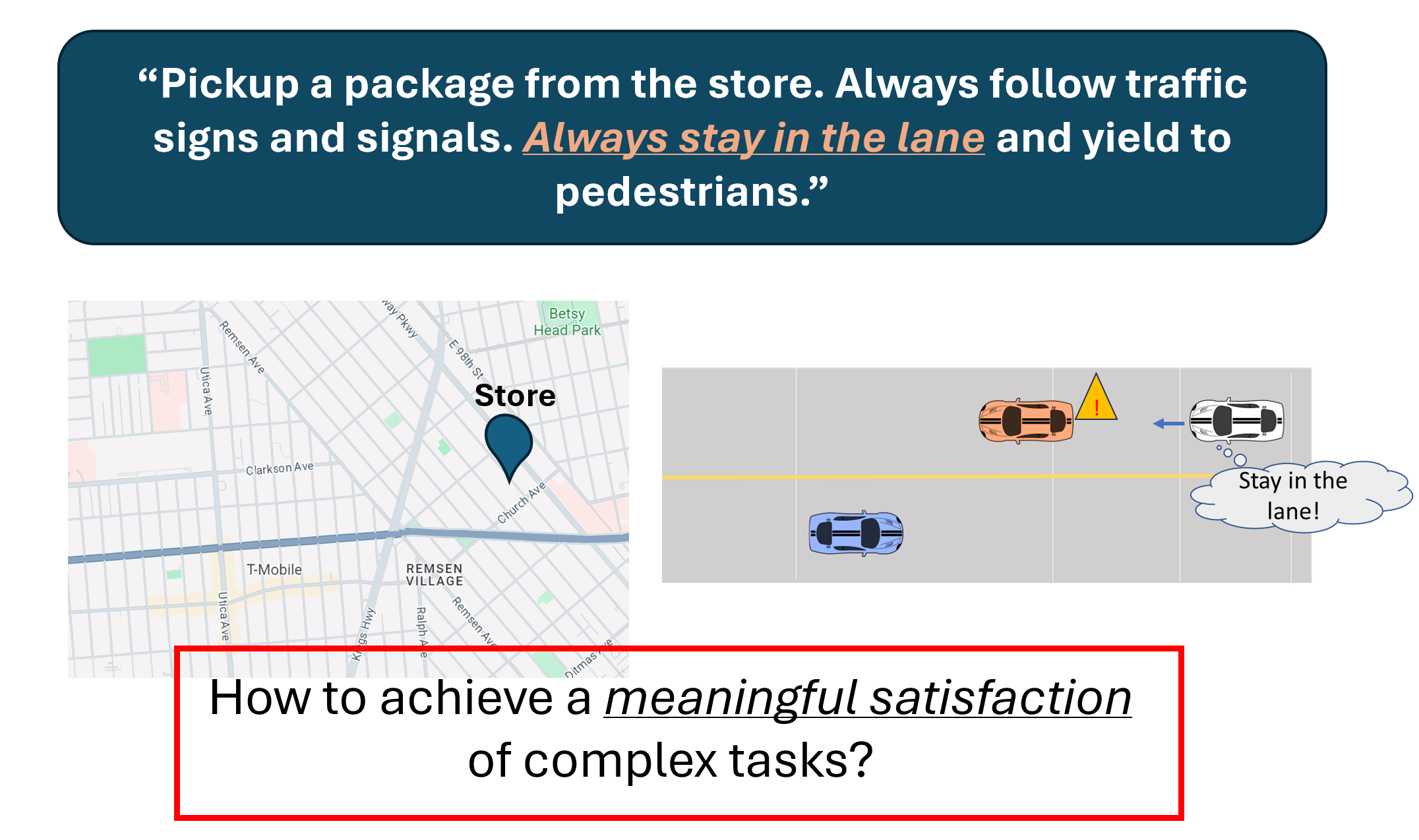
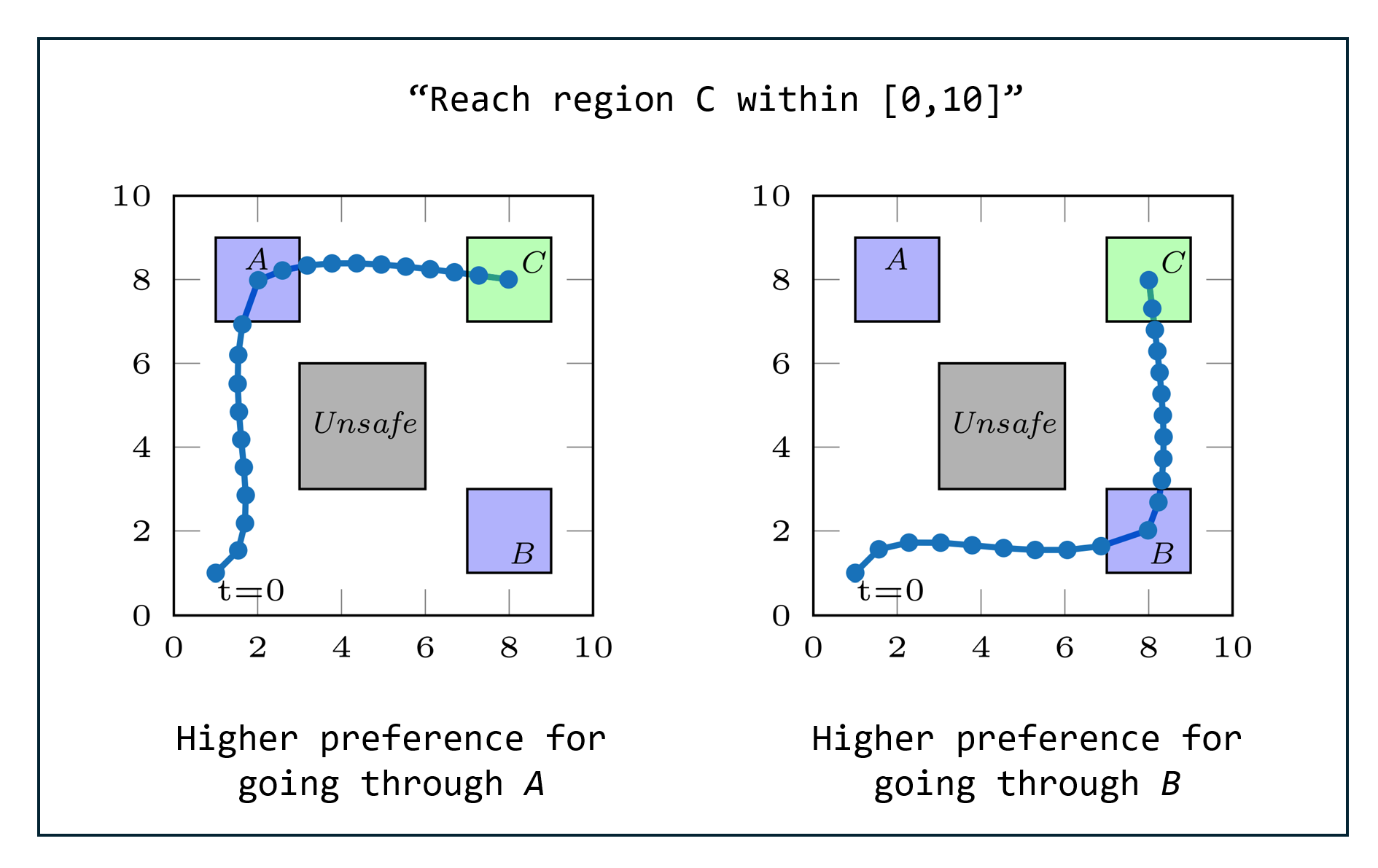
Optimal Planning with User Preferences
Often, the complex tasks assigned to robots could have infeasible or conflicting sub-requirements. In such cases, the traditional formal control synthesis approaches fail. In order to achieve meaningful task satisfaction in scuh scenarios rather than giving up altogether, we propose formal planning frameworks that incorporate user preferences for addressing potential infeasibilities and optimally plan for tasks.